sysmond: Simple service for (embedded) Linux system monitoring
Working on my DIY robot software (Jarvis) in headless mode, i came across a situation where i needed to monitor the system resource such as CPU, battery, memory, network and temperature to measure the "greedy" of my robotic application. Furthermore, as the robot was battery powered, battery safety was a real concern, so i needed something to monitor the battery and shutdown the system when the battery was low to protect it from falling bellow the usable voltage range.
So i've searched for an application/service that allows me to:
- Monitor system memory, CPU, storage usage and temperature
- Monitor network consumption
- Monitor the robot battery and power off the system if the battery is low
None of existing applications/services satisfy all of these requirements, especially, the battery monitoring feature. So i've decided to write a small service that i called sysmond.
sysmond is a simple service that monitors and collects system information such as battery, temperature, memory, CPU, and network usage. The service can be used as backend for applications that need to consult system status. Although it is a part of Jarvis ecosystem, sysmond is a generic service and can be easily adapted to other use cases.
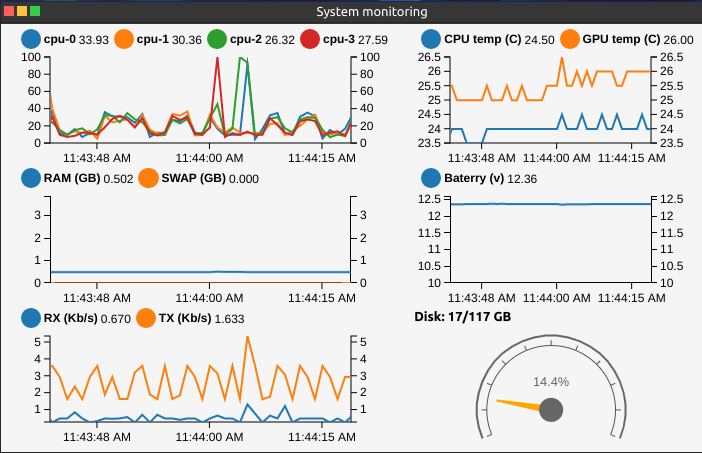
Example of AntOS web application that fetches data from sysmond and visualize it as real-time graphs on my Jarvis robot system. Detail on the use case can be found here
Sysmond monitors resource available on the system via the user space sysfs interface provided by the linux kernel.
Control GPIO using the new Linux user space GPIO API
From the version 4.8, the Linux kernel introduces a new user space API based on character devices for managing and controlling GPIOs ( General-Purpose Input/Output). This post presents the basic of the new interface as well as a simple tutorial/example to demonstrate how to use the new API to control GPIOs.
The hardware used in the tutorial is the Raspberry Pi 3B but the code is generic and can be used on any embedded hardware.
Meet Dolly the robot
Ladies and gentlemen, please meet "Dolly the robot", the first version of my DIY mobile robot. My goal in this DIY project is to make a low-cost yet feature-rich ROS (Robot Operating System) based mobile robot that allow me to experiment my work on autonomous robot at home. To that end, Dolly is designed with all the basic features needed. To keep the bill of material as low as possible, i tried to recycle all of my spare hardware parts.
Specification
- Robot's chassis is 3D printed, the chassis's plate design is borrowed from the design of ** Turtlebot 3** which is a smart design, IMO. The other hardware parts, however, are completely different from the Turtlebot 3.
- IMU sensor with 9 DOF (accelerometer, magnetometer and gyroscope) for robot orientation measurement
- Two DC motors with magnetic encoders using as wheels and odometer
- Arduino Mega 2560 for low level control of the robot
- Raspberry PI 3B+ with embedded Linux for high level algorithm and network communication. The ROS middle-ware on top of the Linux system offers a powerful robotic software environment
- A 360 degree Neato LiDAR (laser scanner) up to 6 m range
- A 8 Mega pixel camera (Raspberry PI camera)
- Adafruit Motor shield V2 for motor controlling
- 10000 Mah battery
- ADS1115 analog sensor to measure and monitor battery usage
- 0.95" (128x64) mini OLED display
- The robot can be tele-operated using a bluetooth controller such as a PS4 controller
Applications
- Localization and mapping (SLAM)
- Obstacle avoidance
- Autonomous navigation
- Robot perception algorithms with LIDAR sensor and camera
- Much more...