sysmond: Simple service for (embedded) Linux system monitoring
Working on my DIY robot software (Jarvis) in headless mode, i came across a situation where i needed to monitor the system resource such as CPU, battery, memory, network and temperature to measure the "greedy" of my robotic application. Furthermore, as the robot was battery powered, battery safety was a real concern, so i needed something to monitor the battery and shutdown the system when the battery was low to protect it from falling bellow the usable voltage range.
So i've searched for an application/service that allows me to:
- Monitor system memory, CPU, storage usage and temperature
- Monitor network consumption
- Monitor the robot battery and power off the system if the battery is low
None of existing applications/services satisfy all of these requirements, especially, the battery monitoring feature. So i've decided to write a small service that i called sysmond.
sysmond is a simple service that monitors and collects system information such as battery, temperature, memory, CPU, and network usage. The service can be used as backend for applications that need to consult system status. Although it is a part of Jarvis ecosystem, sysmond is a generic service and can be easily adapted to other use cases.
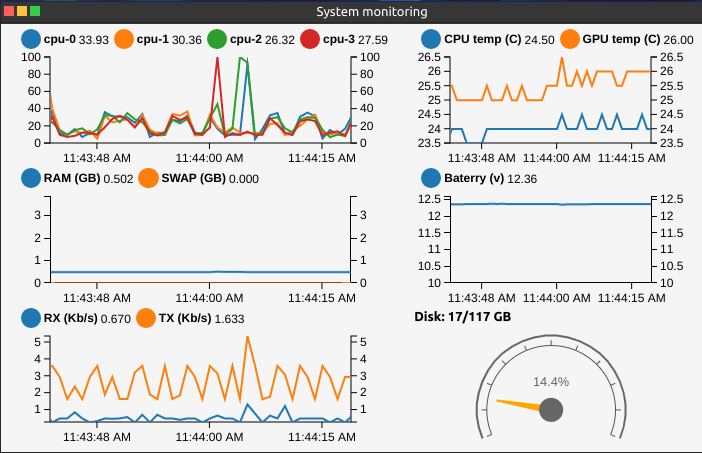
Example of AntOS web application that fetches data from sysmond and visualize it as real-time graphs on my Jarvis robot system. Detail on the use case can be found here
Sysmond monitors resource available on the system via the user space sysfs interface provided by the linux kernel.
Dispatching tasks to multiple Pharo VMs using SystemProcess
Doing a research work in robotic domain using Pharo as a prototype and implementation tool (via phaROS) is a whole new experience. It is quite impressive to see how quick an implementation idea becomes a working prototype/solution in Pharo thanks to its productive development environment. Most of my robotic applications are critical tasks which require real-time performance, some of them are heavily resource-demanding (CPU). Due to the single process nature of Pharo, running these tasks on the same VM results in a performance bottleneck, thus sometime, violate the real-time requirement of the application. Common solution to this problem is to dispatch these tasks to several native system processes to boost the performance. Unfortunately, this feature is not supported in current Pharo. My goal in this case is to have something that allow to:
- maintain the use of Pharo's productive environment, so implementation the applications in another language is not an option
- be able do dispatch tasks to different system processes, (in this case, tasks running on different VMs using the same image), and have a simple inter-VM communication mechanism
And that is when SystemProcess plays its role.